SunFounder Smart Car Kit for Arduino with Uno R3, Obstacle Avoiding, Line Tracing and Light Seeking
|
SunFounder Smart Car Kit for Arduino with Uno R3, Obstacle Avoiding, Line Tracing and Light Seeking is a complete learning kit based on Arduino to experiment with robotics.
|
SunFounder Smart Car Kit for Arduino with Uno R3, Obstacle Avoiding, Line Tracing and Light Seeking, more information
This is a complete learning kit based on Arduino. For better learning, an elaborately-written user manual, code with explanation and thorough schematic diagrams are available from SunFounder
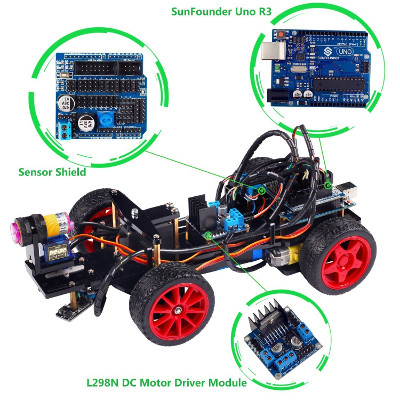
The SunFounder Uno R3 board is used as control. The kit uses a step-down DC-DC converter module to reduce input voltage and a motor driver module with L298N. More importantly, a sensor shield is used so that more I/Os can be led out from SunFounder Uno, which means a lot more functions can be expanded!
With the sample sketches provided, you can make the car move forward/backward and turn left/right, follow a line, seek light and avoid obstacles.
A great kit for you to start studying Arduino (both code and application), learn about the basic modules in electronics, and then use the knowledge learnt to explore greater field!
Working Voltage: 7V-12V; Powered by two 18650 rechargeable lithium batteries (not included!)
Our smart car is a great platform to get started with robot. What we provided are multiple parts, instructions and code needed, so you need to assemble them by yourself, with the help of the user guide. During the course you can thus enjoy the making!
Based on the manual in the kit package, you can make the car all by yourself and then create your own sketch to realize different movements of the car as you want. To support further exploration, a sensor shield is used so that there can be more I/Os from the SunFounder Uno, to which more parts can be connected.
For better experience, a calibration procedure is provided. Before running the car, you need to calibrate the parts so they can work normally under the ambient environment. After all is completed, you can then realize the functions like obstacle avoiding, line tracing, and light seeking, etc.
Component List:
- 1 pack x Acrylic Plates
- 1 pack x Threaded fasteners
- 1 x Tower Pro Micro Servo SG90
- 1 x Tower Pro Micro Servo MG995
- 2 x Gear Reducer
- 4 x Wheel
- 1 x SunFounder UNO R3 board
- 1 x DC Motor Driver Module
- 1 x Step-down DC-DC Converter Module
- 1 x Switch Module
- 1 x Photoelectric Switch
- 4 x Photosensitive Module
- 2 x Obstacle Avoidance Module
- 5 x Tracking Module
- 1 x Dual 18650 battery holder
- 2 x Ribbon (13cm)
- 1 x USB Data Cable
- Serval Dupont Wires
- 1 x Screwdriver
Index Robotics